In our last update about our InMoov, we mentioned that we've been busy working technologies outside of the robot in order to create a much, much smarter robot when we get back to working on the main chassis.
Part of our work has involved testing how the robot will function and move based on what we have planned, as InMoov is very complex we wanted to test with something similar and our Robotis Bioloid robots aren't really up to the task.
We needed a better robot platform.

The time is NAO
We've had our NAO V5 - Evolution (H25) for a while now, we've been running a version of our software that we're developing for InMoov on the NAO, communicating with the NVIDIA Jetson and other hardware in order to test features that will become more complicated when we move it back onto our InMoov.
The NAO is ideal for our needs; we can access similar systems to the InMoov but have much simplified motor system control based on the greatly assisted NAO platform, we can also access the NAO vision systems in a similar way.
The NAO robot (pronounced Now) is a ground-breaking teaching aid for use in robotics, systems and control, computer science, social sciences and beyond. Humanoid robots have always fascinated people, especially students and NAO robot allows them to explore programming, sensors, interaction with people and the environment and much more.
NAO robot stands 58cm tall and is packed full of technology to make it so versatile:
- Humanoid body with 25 degrees of freedom for realistic movement
- 2 cameras for object and face recognition
- 4 microphones allow for directional detection of sound
- 2 ultrasonic range finders for detection of objects
- 2 infrared emitter and receivers
- Inertia sensor for balance control - 2 gyrometers and 1 accelerometer
- Capacitive tactile sensors for interaction with people
- 8 pressure sensors
- 1.6GHz processor with Ethernet and WiFi
Having the additional hardware and computers outboard of the robot does introduce some minor complexities but this will greatly assist with our efforts when we start to move these inboard of our InMoov chassis.
So, this is basically what we've been working with but that's not the end of the story...
Another NAO
As if one wasn't enough we've acquired a second NAO, an orange NAO V4 - Next Gen (H25).
The second NAO was sent with a broken thumb and a faulty arm which would require us to look into, upon its arrival we noticed that the thumb is just disjointed, which should be pretty easy to fix without any major surgery and the arm seems to actually function correctly, albeit a little slow but we'll investigate that and try to recalibrate.

V4 - Next Gen is it?
Whilst checking the robot over we also noticed that the head has the rear microphone ports and is identical to our blue V5 - these suggest that it is not a V4 - Next Gen but actually a V5 - Evolution.
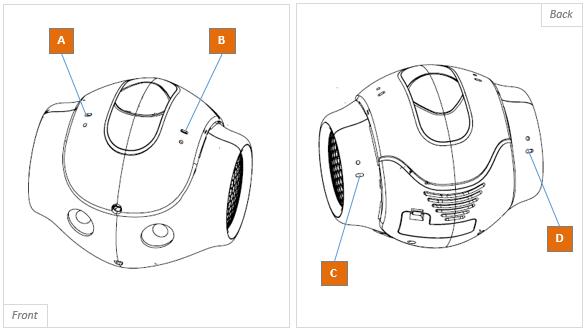
We've never seen a V5 - Evolution in anything other than red or blue; so what do we have here?
Interrogating the robot shows that it correctly identifies the head and body colour as "Orange021C", where our existing robot correctly identifies itself as "BlueP326C".
It also identifies its head and body version, exactly the same as our blue V5 robot as 5.0.0 and the head and body BaseVersion as v5.0.
Also, testing with ALMotionProxy::getRobotConfig() also details the same for both robots.
Model Type : naoH25
Head Version : VERSION_50
Body Version : VERSION_50
Laser : False
Legs : True
Arms : True
Extended Arms : True
Hands : True
Arm Version : VERSION_50
Number of Legs : 2
Number of Arms : 2
Number of Hands : 2
So we've confirmed that our Orange NAO is, in fact also a V5 - Evolution H25.

This is great as we can test our software on two identical platforms and also perform some A-B testing of some features to see how they perform.